
I am a Master Student in the Helping Hands Lab at Northeastern University, working with Professor Robert Platt. My research explores data-efficient robot learning and closed-loop control for contact-rich manipulation, with an emphasis on equivariant representations for policy learning.
Email / Google Scholar / GitHub
Research Interests
- Robot manipulation combining imitation learning and reinforcement learning
- Human-in-the-loop continual learning for robotics
- Mobile Manipulation
- Tactile sensing and closed-loop control for contact-rich tasks
News
Selected Publications
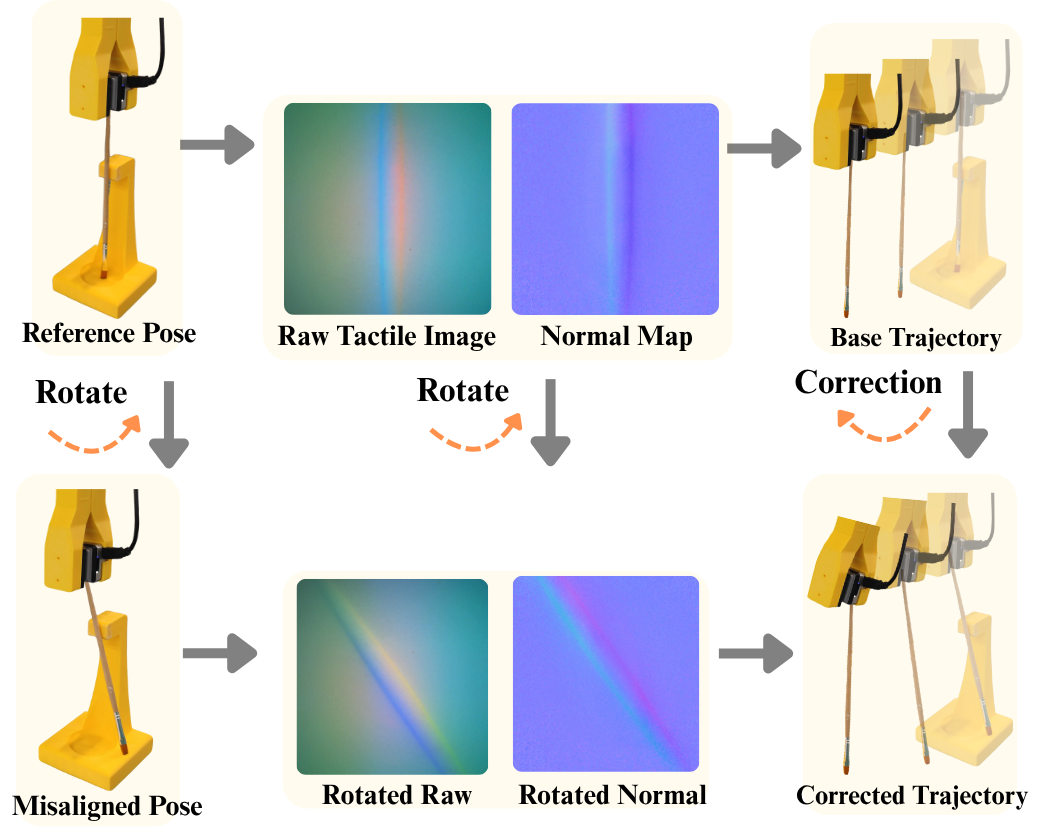
Residual Rotation Correction using Tactile Equivariance
Yizhe Zhu, Zhang Ye, Boce Hu, Haibo Zhao, Yu Qi, Dian Wang, Robert Platt
under review, 2025
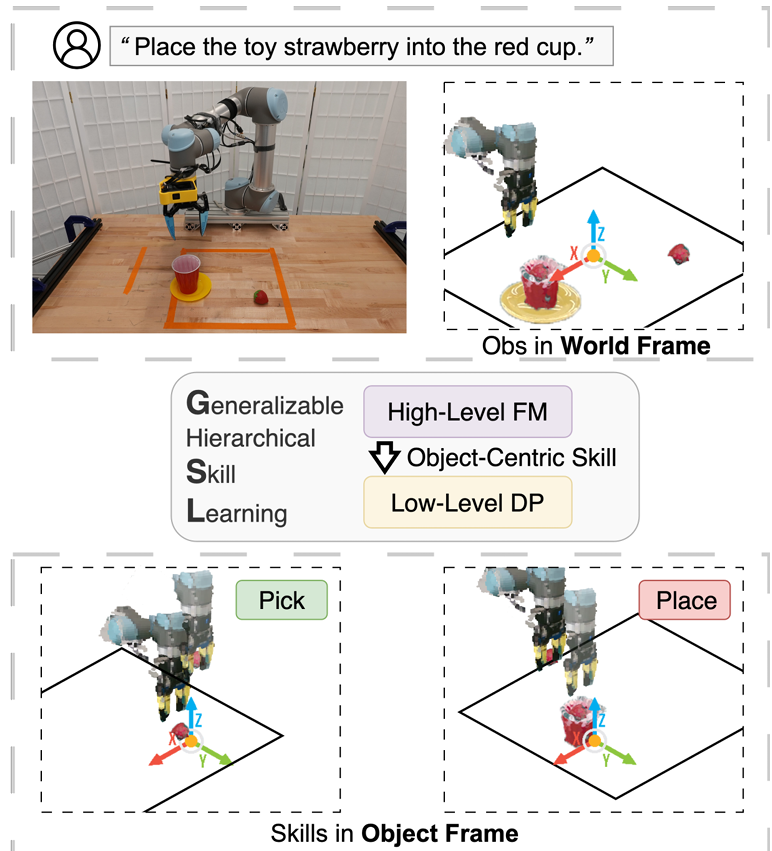
Generalizable Hierarchical Skill Learning via Object-Centric Representation
Haibo Zhao, Yu Qi, Boce Hu, Yizhe Zhu, Ziyan Chen, Xupeng Zhu, Owen Howell, Haojie Huang, Robin Walters, Dian Wang*, Robert Platt*
RAL
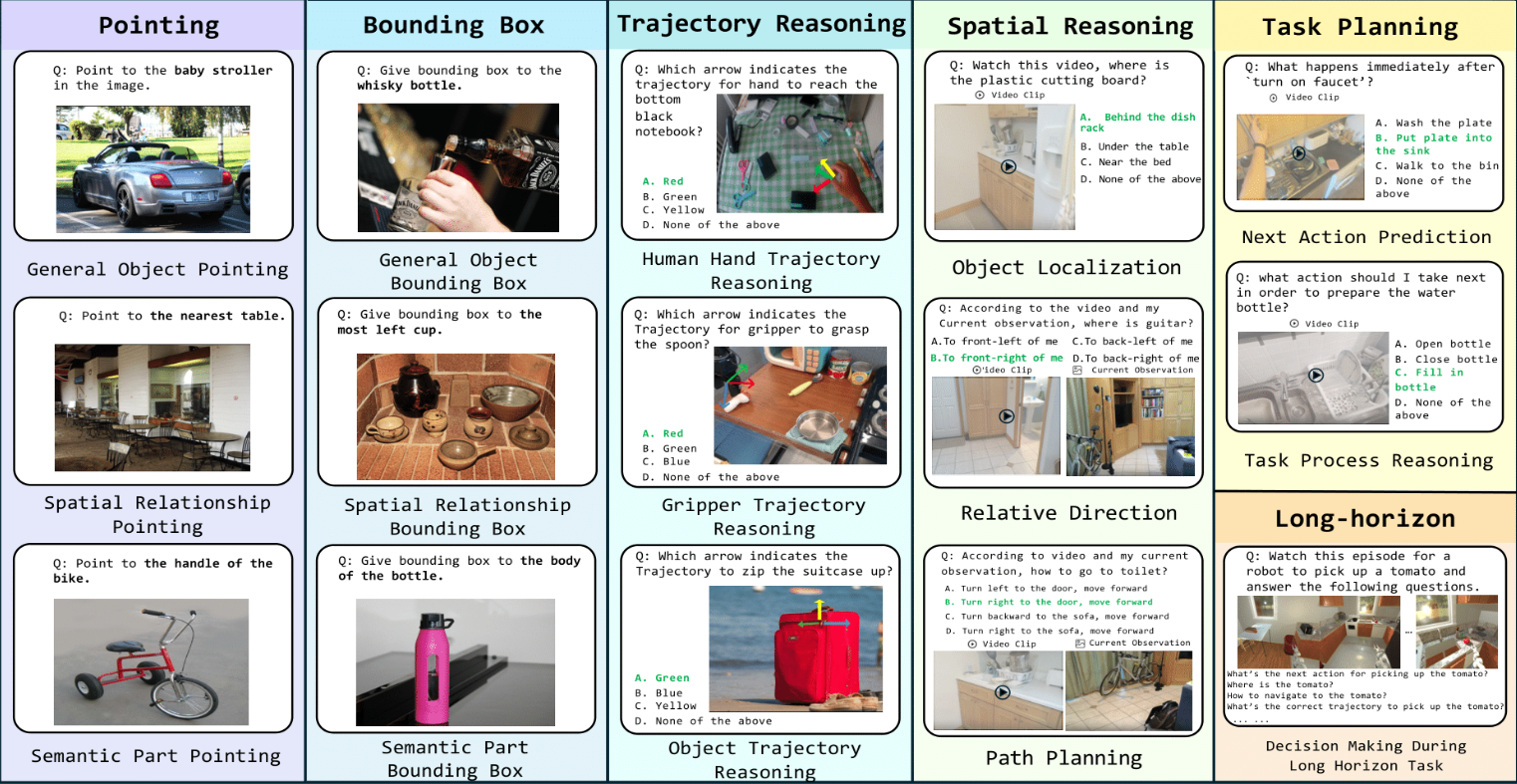
BEAR: Benchmarking and Enhancing Multimodal Language Models for Atomic Embodied Capabilities
Yu Qi, Haibo Zhao, Ziyu Guo, Siyuan Ma, Ziyan Chen, Yaokun Han, Renrui Zhang, Zitiantao Lin, Shiji Xin, Yijian Huang, Kai Cheng, Peiheng Wang, Jiazheng Liu, Jiayi Zhang, Yizhe Zhu, Wenqing Wang, Yiran Qin, Xupeng Zhu, Haojie Huang, Lawson L.S. Wong
under review, 2026
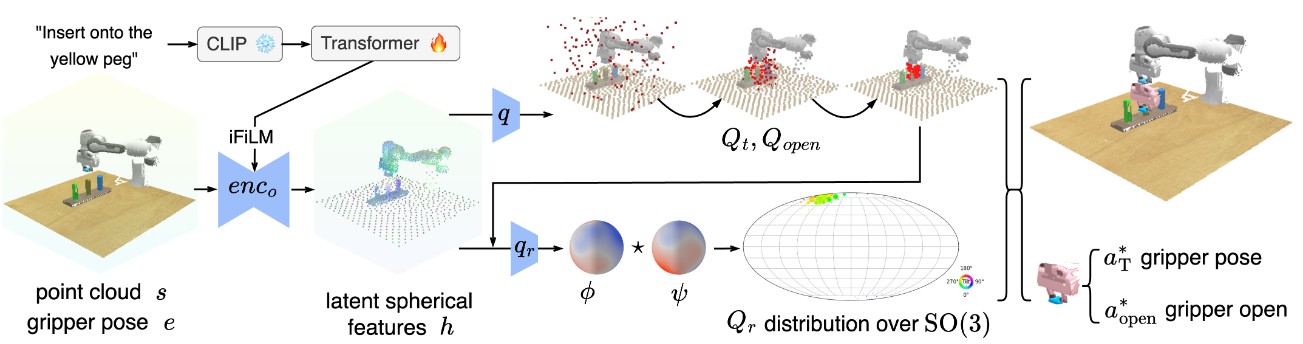
EquAct: An SE(3)-Equivariant Multi-Task Transformer for Open-Loop Robotic Manipulation
Xupeng Zhu,Yizhe Zhu*, Yu Qi*, Robin Walters, Robert Platt
ICLR, 2026
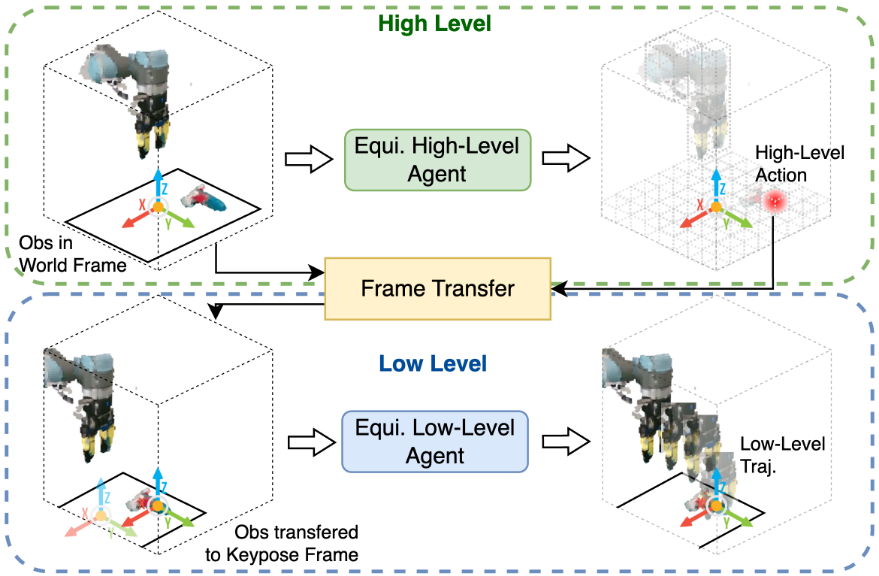
Hierarchical Equivariant Policy via Frame Transfer
Haibo Zhao*, Dian Wang#*, Yizhe Zhu, Xupeng Zhu, Owen Howell, Linfeng Zhao, Yaoyao Qian, Robin Walters, Robert Platt
ICML 2025
Education
- (2024 – present) M.S. in Robotics, Northeastern University, MA
- (2020 – 2024) B.Eng. in Robotics, Xi’an Jiaotong-Liverpool University, China